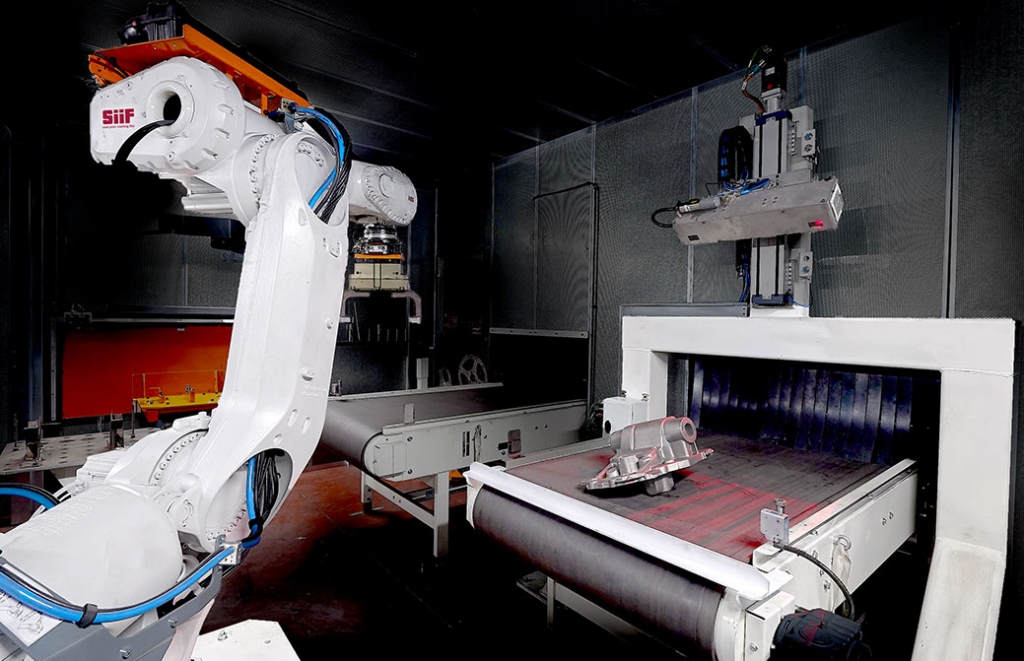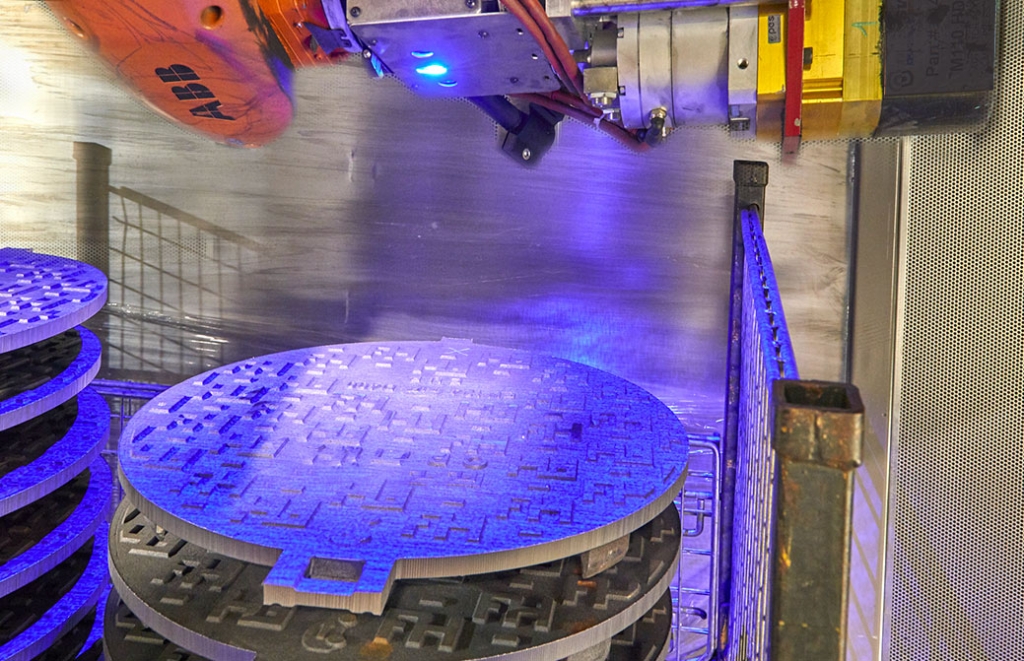
机器人的抓取位置
- 静态铸件采用二维,三维三角测量视觉系统(扫描铸件,固定或移动照相)和三维立体视觉系统。
- 托盘卸载过程中的静态铸件采用三维立体视觉系统。
- 移动铸件采用二维视觉系统(通过跟踪进行机器人抓取)。
简单的缺失/现有类型检查,铸件类型/参考,正确放置等。
- 二维/三维视觉传感器。
- 二维视觉系统。
部件的直径、间距、定位类型检查等。
- 视觉传感器进行简单测量。
- 二维-三维视觉控制系统。
- 采用三维模式对铸件轮廓测量。
- 使用三维体积传感器卸载铸件:IFM。
SiiF集成了以下产品:COGNEX、SICK、KEYENCE、ENSENSO(HALCON软件)和IFM等。